Difference between revisions of "Learning, Modelling and Data Science"
(Created page with " The Learning, Modelling, and Data Science team brings together researchers in the team who work on artificial intelligence (AI), simulation, and computer vision methods. =...") |
|||
| (17 intermediate revisions by 3 users not shown) | |||
| Line 1: | Line 1: | ||
| + | The Learning, Modelling, and Data Science team brings together researchers in the team who work on artificial intelligence (AI), simulation, and computer vision methods. | ||
| − | + | <div style="position: relative; overflow: hidden; height: 300px;"> | |
| + | <div id="wrapper"> | ||
| + | <slideshow sequence="random" transition="fade" refresh="3000" center="true"> | ||
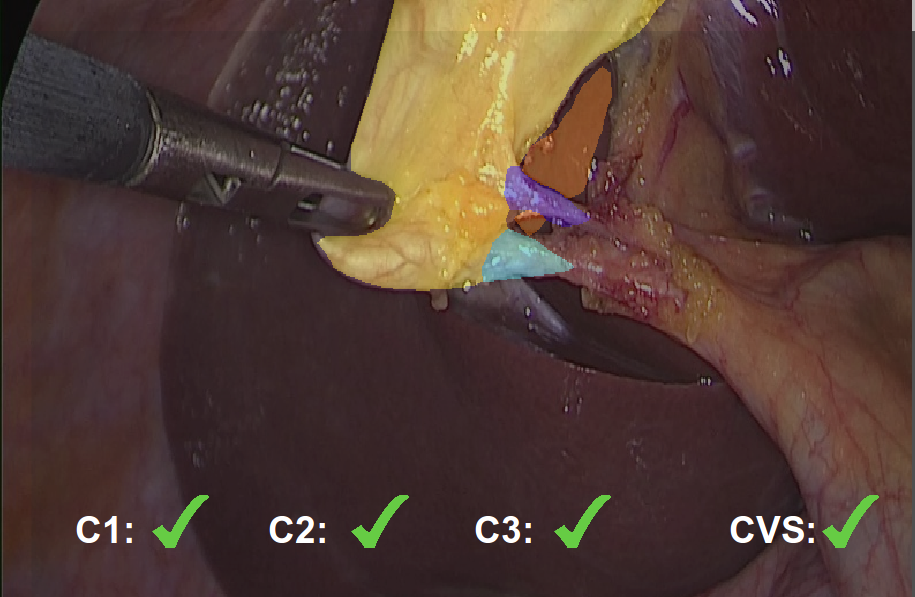
| + | <div style="position: relative; height: 1%;">[[Image:cvs.png|right|500px|Image-based estimation of the critical view of safety in cholecystectomy]]</div> | ||
| + | <div style="position: relative; height: 1%;">[[Image:funsis.png|right|500px|Unsupervised tool segmentation in endoscopic videos]]</div> | ||
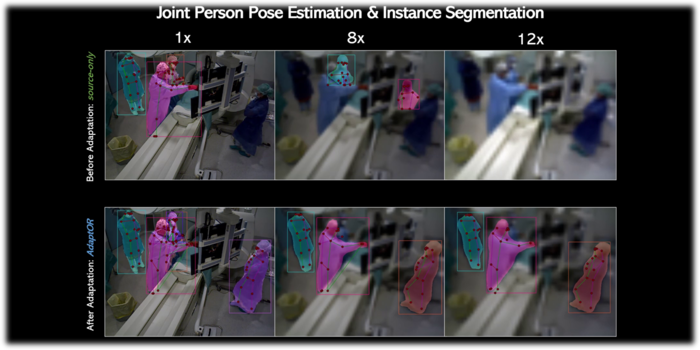
| + | <div style="position: relative; height: 1%;">[[Image:pose_est.png|right|500px|3D pose estimation in the OR from RGBD cameras]]</div> | ||
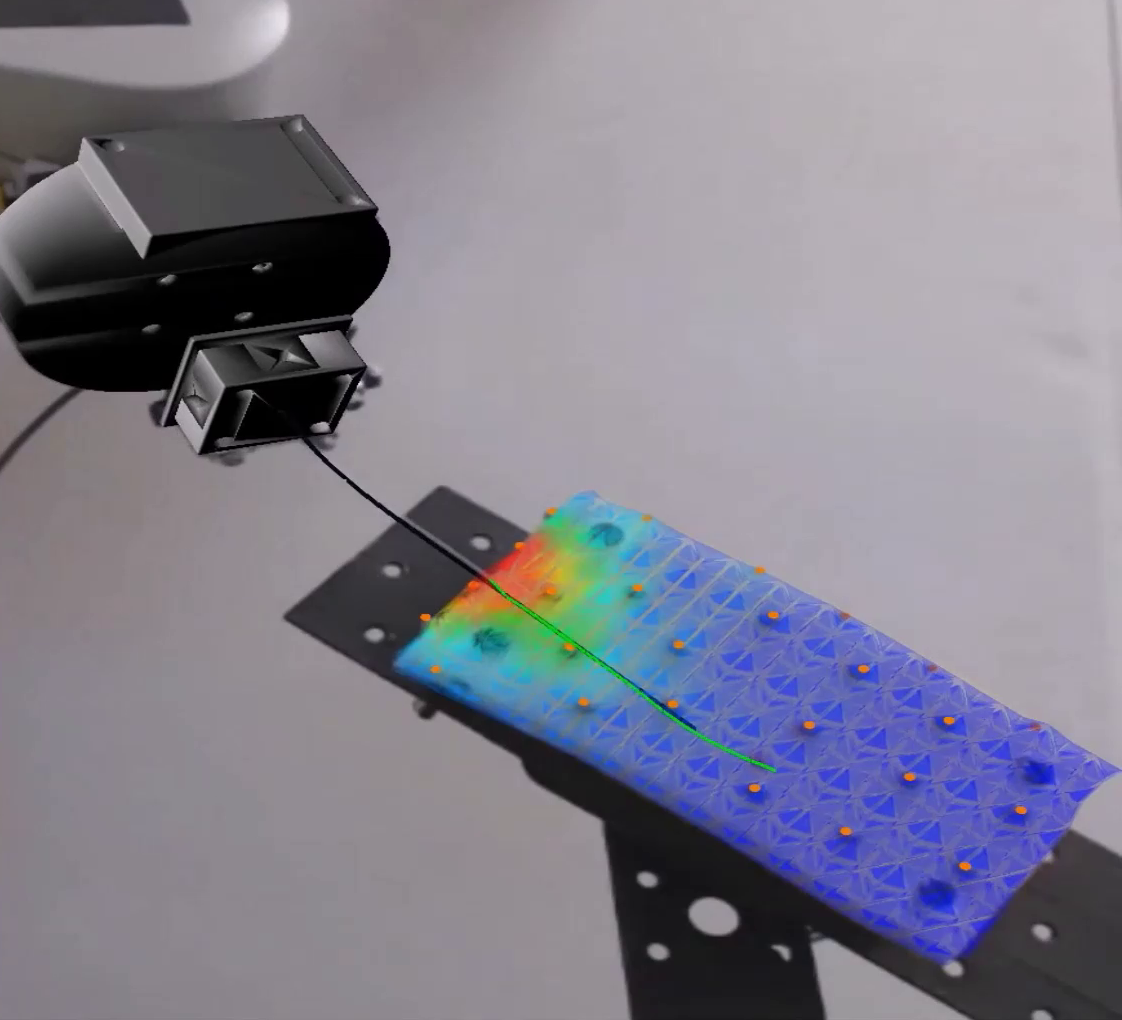
| + | <div style="position: relative; height: 1%;">[[Image:sperry.png|right|500px|Robotic needle insertion with finite element simulation in the control loop]]</div> | ||
| + | <div style="position: relative; height: 1%;">[[Image:us_elasto.png|right|500px|MRI elastography]]</div> | ||
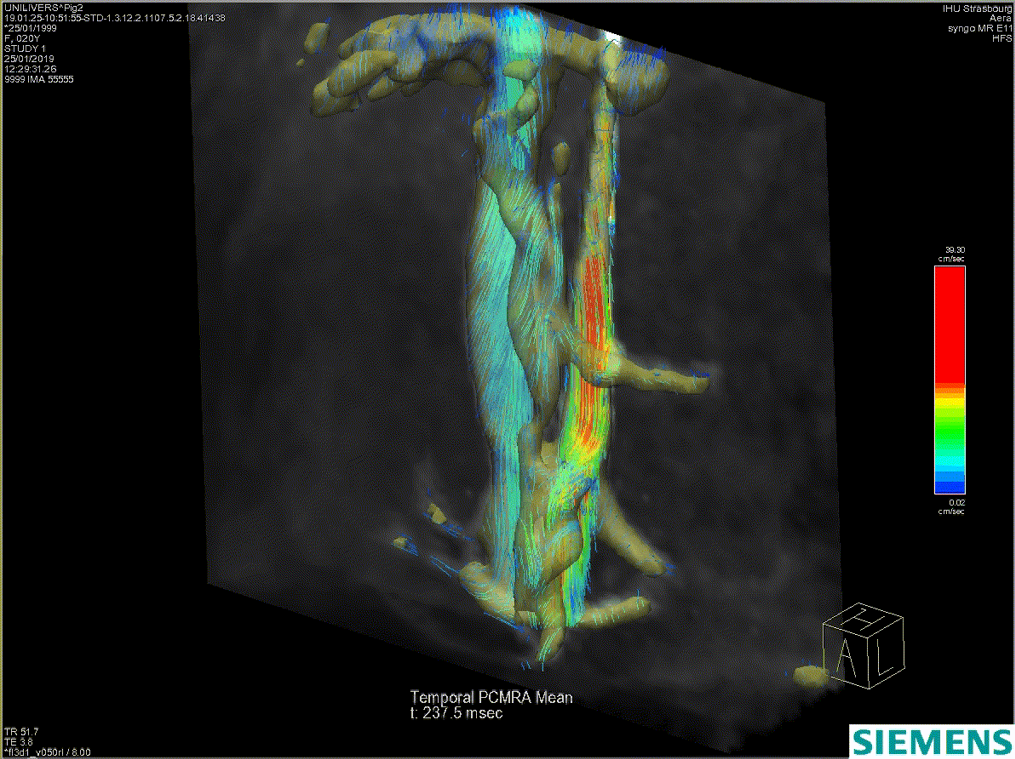
| + | <div style="position: relative; height: 1%;">[[Image:veineporte.png|right|500px|Portal vein flow reconstruction from real-time imaging]]</div> | ||
| + | <div style="position: relative; height: 1%;">[[Image:xaware.png|right|500px|Physical simulation for radiation exposure estimation in the OR]]</div> | ||
| + | </slideshow> | ||
| + | </div> | ||
| + | </div> | ||
== Computer vision, object recognition and scene understanding == | == Computer vision, object recognition and scene understanding == | ||
| − | Adlane Habed | + | [http://habed.weebly.com/ Adlane Habed] |
| − | Nicolas Padoy | + | Jean-Paul Mazellier |
| − | Benoit Rosa | + | [http://camma.u-strasbg.fr/npadoy Nicolas Padoy] |
| − | + | [https://sites.google.com/site/benoitrosa Benoit Rosa] | |
| − | + | Vinkle Srivastav | |
| + | This axis concerns the development of computer vision methods for object recognition, 3D scene understanding and assessment, endoscopic image segmentation, or surgical phase estimation. Optimization methods have been developed for applications such as the autocalibration of cameras or visual odometry. We are interested in building original, robust optimization algorithms, exploiting rich multi-modal information such as semantic maps. In the medical context, a driving theme is the development of a surgical control tower, monitoring events in the operating room. Majors results have been obtained using modern deep learning techniques, for instance regarding the 3D pose estimation of operators in the room, surgical phase estimation, and segmentationor pose estimation of surgical instruments. A limitation of such methods is the need for large, high quality datasets. We are therefore more and more interested in weakly- and self-supervised approaches, which exploit available data sources or a specific structure of the information in order to limit the amount of labeled data required. | ||
== Numerical simulation methods for surgical applications == | == Numerical simulation methods for surgical applications == | ||
| − | Simon Chatelin | + | [https://www.simonchatelin.icube.cnrs.fr/ Simon Chatelin] |
| − | Hadrien Courtecuisse | + | [https://hadrien.courtecuisse.cnrs.fr/ Hadrien Courtecuisse] |
Jean-Philippe Dillenseger | Jean-Philippe Dillenseger | ||
| − | The second major problem we tackle in this theme is the development of numerical simulation methods for surgical applications. A first application of such models is to help the design and modeling of robots. An interesting approach developed in partnership with researchers from the MLMS team is to include real-time finite element simulations within the control loop of a robotic system in order to anticipate environment deformations and interactions. We are also interested in developing biomechanical models of patient-specific features such as soft tissues. Finally, simulations can also drive the training of surgical staff, as shown with the X-aware prototype in which physical radiation models and AI-based 3D pose estimation allow making a clinician aware of his/her full body exposure to x-ray during interventional radiology procedures. | + | The second major problem we tackle in this theme is the development of numerical simulation methods for surgical applications. A first application of such models is to help the design and modeling of robots. An interesting approach developed in partnership with researchers from the MLMS team is to include real-time finite element simulations within the control loop of a robotic system in order to anticipate environment deformations and interactions. We are also interested in developing biomechanical models of patient-specific features such as soft tissues. These developments are accompanied by the development of methods for the acquisition of multi-scale and patient-specific in vivo physical parameters via biomedical imaging (with a specific focus on elastography using preclinical and clinical MRI and ultrasound methods). Finally, simulations can also drive the training of surgical staff, as shown with the X-aware prototype in which physical radiation models and AI-based 3D pose estimation allow making a clinician aware of his/her full body exposure to x-ray during interventional radiology procedures. |
| − | |||
== Data sience methods and clinical translation == | == Data sience methods and clinical translation == | ||
| − | + | Alexandros Karargyris | |
Jean-Paul Mazellier | Jean-Paul Mazellier | ||
| − | Nicolas Padoy | + | [http://camma.u-strasbg.fr/npadoy Nicolas Padoy] |
| + | Vinkle Srivastav | ||
The last axis within this theme concerns transverse methodological research problems in AI, which could be applicable to both computer vision and simulation methods. We aim to tackle key problems towards clinical application of the methods developed in our work. One first key problem is the generalizability problem, i.e. proving that our methods are robust to diverse conditions. To this aim, we develop data augmentation techniques with original synthetic data generation methods. We have recently started working on coupling simulation and AI or computer vision methods in a synergistic fashion. Simulated models can for instance be a source of information to augment available data with semi-synthetic inputs in order to train more realistic AI models without increasing the data gathering and annotation costs. We are also increasingly interested in federated learning approaches, for training models with multi-centric sensitive data. | The last axis within this theme concerns transverse methodological research problems in AI, which could be applicable to both computer vision and simulation methods. We aim to tackle key problems towards clinical application of the methods developed in our work. One first key problem is the generalizability problem, i.e. proving that our methods are robust to diverse conditions. To this aim, we develop data augmentation techniques with original synthetic data generation methods. We have recently started working on coupling simulation and AI or computer vision methods in a synergistic fashion. Simulated models can for instance be a source of information to augment available data with semi-synthetic inputs in order to train more realistic AI models without increasing the data gathering and annotation costs. We are also increasingly interested in federated learning approaches, for training models with multi-centric sensitive data. | ||
Latest revision as of 15:55, 11 October 2022
The Learning, Modelling, and Data Science team brings together researchers in the team who work on artificial intelligence (AI), simulation, and computer vision methods.



Computer vision, object recognition and scene understanding
Adlane Habed Jean-Paul Mazellier Nicolas Padoy Benoit Rosa Vinkle Srivastav
This axis concerns the development of computer vision methods for object recognition, 3D scene understanding and assessment, endoscopic image segmentation, or surgical phase estimation. Optimization methods have been developed for applications such as the autocalibration of cameras or visual odometry. We are interested in building original, robust optimization algorithms, exploiting rich multi-modal information such as semantic maps. In the medical context, a driving theme is the development of a surgical control tower, monitoring events in the operating room. Majors results have been obtained using modern deep learning techniques, for instance regarding the 3D pose estimation of operators in the room, surgical phase estimation, and segmentationor pose estimation of surgical instruments. A limitation of such methods is the need for large, high quality datasets. We are therefore more and more interested in weakly- and self-supervised approaches, which exploit available data sources or a specific structure of the information in order to limit the amount of labeled data required.
Numerical simulation methods for surgical applications
Simon Chatelin Hadrien Courtecuisse Jean-Philippe Dillenseger
The second major problem we tackle in this theme is the development of numerical simulation methods for surgical applications. A first application of such models is to help the design and modeling of robots. An interesting approach developed in partnership with researchers from the MLMS team is to include real-time finite element simulations within the control loop of a robotic system in order to anticipate environment deformations and interactions. We are also interested in developing biomechanical models of patient-specific features such as soft tissues. These developments are accompanied by the development of methods for the acquisition of multi-scale and patient-specific in vivo physical parameters via biomedical imaging (with a specific focus on elastography using preclinical and clinical MRI and ultrasound methods). Finally, simulations can also drive the training of surgical staff, as shown with the X-aware prototype in which physical radiation models and AI-based 3D pose estimation allow making a clinician aware of his/her full body exposure to x-ray during interventional radiology procedures.
Data sience methods and clinical translation
Alexandros Karargyris Jean-Paul Mazellier Nicolas Padoy Vinkle Srivastav
The last axis within this theme concerns transverse methodological research problems in AI, which could be applicable to both computer vision and simulation methods. We aim to tackle key problems towards clinical application of the methods developed in our work. One first key problem is the generalizability problem, i.e. proving that our methods are robust to diverse conditions. To this aim, we develop data augmentation techniques with original synthetic data generation methods. We have recently started working on coupling simulation and AI or computer vision methods in a synergistic fashion. Simulated models can for instance be a source of information to augment available data with semi-synthetic inputs in order to train more realistic AI models without increasing the data gathering and annotation costs. We are also increasingly interested in federated learning approaches, for training models with multi-centric sensitive data.