Complex Systems and Parsimony
Theme Leaders Jacques Gangloff, jacques.gangloff@unistra.fr Lennart Rubbert, lennart.rubbert@insa-strasbourg.fr Hassan Omran, homran@unistra.fr
The minimization of the ecological footprint of complex systems is the common denominator of this theme. Frugal mechatronic systems allow, by their original structure, to minimize the energy and raw material used for their manufacturing. Advanced control allows to minimize their energy consumption and their polluting emissions while making limited compromises on performance and robustness. Real-time embedded vision adds exteroceptive feedback to the control system to improve the accuracy and dynamic performance of lightweight mechanical systems.
Complex Systems
Event-Based Control
Sylvain Durand, sdurand@unistra.fr
Although periodicity simplifies the analysis in control theory, it results in conservative resource utilization because the control signal is computed, transmitted, and updated at the same rate, regardless of whether it is required or not. In contrast, the so-called "event-driven" paradigm exploits resources whenever they are truly needed. In such a novel framework, control updates are performed based on a triggering condition (e.g., when the dynamics of the controlled system or its environment change), resulting in sampling intervals that are no longer equidistant in time. The number of sampling instants can then be considerably reduced (compared to the periodic scheme) and, consequently, the computational usage and the network bandwidth. For all these reasons, event-triggered approaches offer opportunities for embedded cyber-physical systems with limited resources.
A new event-based control architecture was developed in the e-VISER ANR project context, with a complete event-driven sensorimotor chain from perception to actuation. Also, event-triggered control is investigated in the dark-NAV ANR project in the aim to develop new navigation strategies for UAVs in GPS-denied dark environment using aperiodic flash-based photolocation.
Control of Cobots
Hassan Omran, homran@unistra.fr Bernard Bayle, bernard.bayle@unistra.fr Edouard Laroche, laroche@unistra.fr
We are interested in developing new methodologies for the control of collaborative robots (cobots) and the physical human-robot interaction. Our main focus is on using optimization-based methods, such as Model Predictive Control (MPC), which permits to impose a desired compliant behavior of the robot while respecting a set of safety constraints. We are also interested in integrating biosignals (electromyography) into the robot control strategy. This allows to obtain information about the human operator intentions and enhance the physical human–robot interaction dynamics.
Other topics in collaboration with CEA-LIST are:
- design of synthesis schemes for robust control of cobots, maximizing the transparency perceived by the operator (PhD of Neil Abroug)
- design of optimal excitation signals for identification of cobots that enable to finely identify the low-frequency flexible modes to be accounted for in the control scheme (also with LIAS, U. Poitiers) (PhD of Bassem Boukhebouz)
Control of Nonlinear Systems Defined by Algebro-differential Equations
Edouard Laroche, laroche@unistra.fr Iuliana Bara, bara.iuliana@unistra.fr Hassan Omran, homran@unistra.fr Olivier Piccin, Olivier.Piccin@insa-strasbourg.fr
The laws of Physics naturally appear as differential and algebraic (i.e. without any differential term) equations, leading to so called DAE models. For control design purposes, the classical approach consists in firstly reducing the algebraic equations in order to obtain a minimal-order model composed of ordinary differential equations (ODE) and then, a controller is synthesized based on this ODE model. The first step of this approach has two drawbacks:
- It increases the complexity of the parameter dependence, and is therefore unusable for complex systems.
- The reduction step may be difficult to deal with (or even impossible) in a nonlinear context.
Although a number of results are available in Control Theory for the analysis and the control design for linear DAE models, also called linear descriptor models, there is still a lot of work to be done in the case of complex descriptor systems.
Our research activities aim at developing methodologies for simulation, analysis and controller synthesis based on DAE models and exploit them for the control of complex systems. Our current activities consider, as application domain, planar cable-driven parallel robots that naturally exhibit algebraic equations coming from the mechanical closed-loop chains composed by the platform and the cables (PhD of Rima Saadaoui).
In addition to developing methodologies for practical applications, our activities seek for new theoretical analysis/design results based on less restrictive approaches (non quadratic Lyapunov functions, PhD of Ana Dos Santos).
Parsimony
Compliant Mechanisms
Lennart Rubbert, lennart.rubbert@insa-strasbourg.fr
Compliant mechanisms have many advantages thanks to their monolithic design. Indeed, they do not present any play, friction, wear or tear which makes them good candidates for realizations without assembly, easily printable, miniaturisable and with long life. Compliant mechanisms are therefore perfect candidates to be integrated in mechatronic devices where simplicity, control of the behavior and long life are sought. The emblematic applications of compliant mechanisms are precision mechanics, micro-mechanics and MEMS for the miniaturization capabilities, the medical field for the monolithic character and thus easily sterilisable, and the space field for the control of the mechanical behavior and the long lifetime without need for maintenance.
In the framework of Benjamin Calmé's PhD work, financed by the LABEX CAMI, we are currently developing in collaboration with the LIRMM an XY platform printed with active polymers. This XY positioning platform allows us to consider solutions without assembly, whose thermo-mechanical behavior is mastered, with a long life span while being economical in terms of resources and production costs.

Cable-Driven Parallel Robotics
Jacques Gangloff, jacques.gangloff@unistra.fr Loïc Cuvillon, l.cuvillon@unistra.fr Sylvain Durand, sdurand@unistra.fr Edouard Laroche, laroche@unistra.fr
One specificity of Cable-Driven Parallel Robots (CDPRs) is that the rigid linkages of common parallel robots are replaced by cables. Using cables, CDPRs can achieve a high payload to robot mass ratio, large workspace, high-speed motion and cost effectiveness. However, the drawbacks inherent to cables are unilateral force — a cable can only pull and not push — and elasticity. Our team has studied the possibility of embedding additional actuators on the end-effector of a CDPR to actively correct these intrinsic weaknesses by the control. Moving masses and cold air thrusters have been studied as part of the DexterWide ANR project. Drone propellers have been studied during the eVISER ANR project.
Cable-driven manipulators are also considered as a challenging benchmark for control methodologies as they include several complexity sources: multivariable, non-linear with flexible modes and algebraic equations. See the section Control of Nonlinear Systems Defined by Algebro-differential Equations above for details.
Aerial Manipulation
Jacques Gangloff, jacques.gangloff@unistra.fr Loïc Cuvillon, l.cuvillon@unistra.fr Sylvain Durand, sdurand@unistra.fr Adlane Habed, habed@unistra.fr
The goal of the dextAIR project is to study a new type of aerial manipulator using an elastic suspension. Nonlinear Model Predictive Control has been used to combine the computation of the optimal control input, the saturation management and the allocation of the control to the overactuated system. Elastic suspension from a CDPR has been studied within the eVISER ANR project. The goal of the STRAD ANR project is to develop an aerial manipulator based on the dextAIR concept for painting a huge street art mural. With the ANR TIR4sTREEt project, the goal is to use a dextAIR aerial manipulator to autonomously scan an urban area with climatology sensors.
Active Markers
Christophe Doignon, c.doignon@unistra.fr
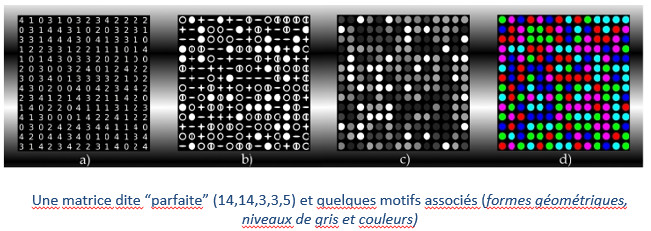
Tracking and visual servoing with coded structured lighting. More specifically, embedded and lightweight systems are targeted. When these systems are articulated, the mechanical structure is very light and the precise guidance of movements is a challenge. When the environment in which these systems evolve exhibits variability (of luminosity, of texture), or even when no visual cue is perceptible by the sensor, artificial matrix markers embedding information redundancy are projected on the object of interest, with a device that is also embedded. Research problems related to real-time encoding/decoding of digital patterns, dynamic choice of visual cues to be projected, registration and automatic control are then studied in this framework.