Medical Robotics and Interventional Imaging
The Medical Robotics and Interventional Imaging Research axis encompasses activities of the team in the field of robotic assistance to minimally invasive medical and surgical procedures and around methodological and clinical developments in interventional radiology.
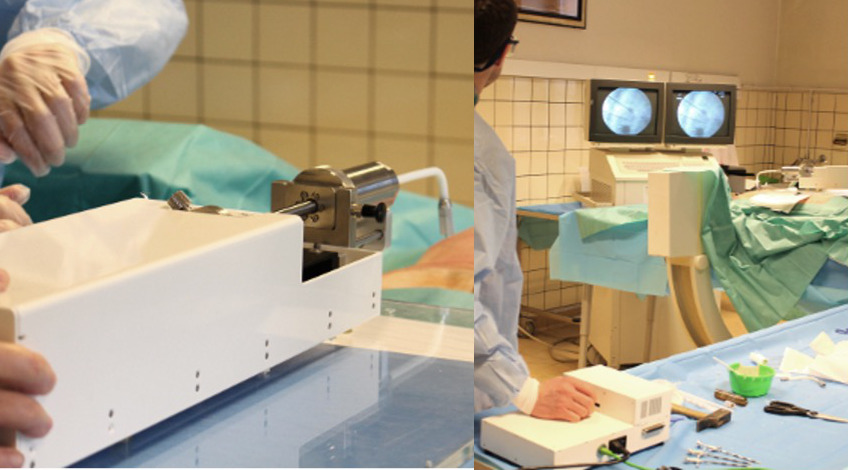
Robot-aided Cementoplasty in interventional radiology
The RDH team has an ongoing collaboration with the Department of Interventional Imaging of Strasbourg University Hospital (HUS) on bone consolidation by cementoplasty. Cementoplasty consists in injecting orthopedic cement into osteoporotic or metastasized bone, under fluoroscopic guidance. The main rationale for robotizing this procedure is to deport the physician from the X-ray source, protecting him/her from repeated, harmful X-ray exposure. Interventional radiology, multiphysics modeling and simulation, as well as robotic gesture assistance are involved in this interdisciplinary research. The study of cementoplasty has structured a team of researchers and practitioners and led to numerous Master projects (>8 between 2011 and 2022) and two PhD theses. As a result of the SpineTronic project (2013-2016, SATT Conectus), a robotic system was developed allowing the practitioner to remotely control the cement viscosity during the injection. The BoneTronic project (Labex Cami BoneTronic 2020-22) addresses percutaneous cementoplasty for large volumes of PMMA such as in the pelvis. We established the specifications of a manual injector designed to handle large volumes of cement while delaying its polymerization. As part of the BoneTronic project, this device was developed along with low-cost pelvic phantoms for the cementoplasty procedure, especially for junior practitioners. Through this work, the team has developed numerous avenues for translational research, particularly in the field of pelvic oncology with bone consolidation by combining screws and cementoplasty. This work has led to the development of various devices or phantoms and to the publication of several scientific articles.
Laurence Meylheuc, laurence.meylheuc(at)insa-strasbourg.fr Bernard Bayle, bernard.bayle(at)unistra.fr Julien Garnon, julien.garnon(at)chru-strasbourg.fr
Manufacturing process, new devices and robots for Interventional procedures
The RDH develops long-term research activities in the field of assistance to percutaneous procedures, as illustrated above by the projects on robot-assisted cementoplasty. Researchers of the RDH team have used their expertise in the fields of material science, 3D-printing techniques and actuation to develop new solutions for image-guided percutaneous procedures. In particular, the SPIRITS project (Smart Printed Interactive Robots for Interventional Therapy and Surgery) combined the existing complementary expertise of 5 partners and 8 associate partners in the Upper Rhine Region. Thanks to advanced manufacturing strategies, novel actuation solutions for the control of surgical needles were developed. Pneumatic and hydraulic actuators have been created, in particular by using the freedom of shape of 3D-printing to introduce innovative piston designs. In the end, several demonstrators using passive or active hydraulic technologies have been set up to validate the capacity to produce robotic components and systems, which are compatible with the stringent medical environment. Several prototypes have been produced and tested preclinically. Compatibility with X-Ray and MRI devices was established, and the impact of robotics in terms of procedure duration and X-ray exposure was also analyzed in collaboration with the University Hospital of Strasbourg. Feedback from radiologists was collected throughout the duration of the project. The results are very encouraging in terms of safety improvement and ease of use [REF]. Following the SPIRITS project, researchers of the RDH team, in collaboration with the Instant-Lab of EPFL, have developed a passive needle with variable stiffness for interventional radiology (ARC project, SATT Conectus). The stiffness change of the ARC needle is achieved by means of microfabricated flexure joints that can be locked and unlocked. When inserting the ARC needle, the bevel of the needle will favor a greater or lesser bending direction of the needle depending on the chosen stiffness. The possibility of easily bending the needle by several degrees allows accessing targets that are difficult to reach, by avoiding obstacles or considering new entry points. The ARC needle also allows the correction of the insertion trajectory without complete withdrawal of the needle, which limits the risks of infection and reduces the intervention time. Finally, it allows access to several targets in the same area for tissue harvesting or any other localized treatment.
ARC project Website: https://arc-needle.carrd.co/
Pierre Renaud, pierre.renaud(at)insa-strasbourg.fr Lennart Rubbert, lennart.rubbert(at)insa-strasbourg.fr Francois Geiskopf francois.geiskopf(at)insa-strasbourg.fr Laurent Barbé, barbe(at)unistra.fr Bernard Bayle, bernard.bayle(at)unistra.fr
Teleoperated robot-assisted flexible endoscopic surgery
A historical research area of the RDH team is the development of innovative mechatronic systems to assist surgeons during procedures in the digestive tract. New endoluminal procedures using flexible gastroenterology endoscopes allow treating pathologies such as tumors without any incision. But the techniques are very difficult and are performed by only a few experts in France, which limits patient access to these innovative treatments. The STRAS prototype is a telemanipulated system based on flexible instruments that allows a single operator to control an endoscope and two miniature instruments with surgical effectors simply and intuitively. The feasibility of using this robot for endoscopic colonic submucosa dissection (ESD) procedures has been demonstrated. This led the team to collaborate with the German company Karl Storz (manufacturer of endoscopes) and the IRCAD (Institute for Research on Cancers of the Digestive System) within the framework of a maturation project financed by the SATT Conectus. The objective was to develop a new version of the robot, called EASE, intended to be compatible with clinical trials. We have demonstrated that a non-specialist surgeon was able to perform endoscopic submucosal dissections in a safer and more efficient way thanks to the EASE Robot. These results have been published in the leading journal in the field of Gastroenterology (REF Gastroenterology). Robotizing flexible instruments raises fundamental open questions on the scientific and technological level. In this context, the Equipex+ TIRREX project and its medical axis was launched at the end of 2021. One of its objectives is to propose an open platform based on these developments, so that the academic community and industrial partners can work on a reference device in the field of flexible systems for surgery. To our knowledge, there is currently no equivalent research instrument in Europe.
Florent Nageotte, nageotte(at)unistra.fr Philippe Zanne, zanne.philippe@unistra.fr Benoit Rosa, b.rosa(at)unistra.fr
Interventional MRI methods for assistance to interventional procedures
Minimally-invasive procedures rely on the use of medical imaging (CT-scan, MRI, ultrasound...) for their guidance and monitoring. Among these imaging modalities, Magnetic Resonance Imaging (MRI) is strongly developing because of the absence of radiation for physicians and patients, the extremely rich tissue contrast it offers and the possibility to image several imaging planes in any orientation. Major clinical indications in interventional MRI are biopsies, injections, and tissue ablations for either curative of palliative intention. The RDH team develops new methods and techniques for assisting MRI-guided interventions. In particular, we have proposed a novel method for monitoring thermal ablations in real time using simultaneous MR Thermometry and MR Elastography. Temperature and elasticity have been shown to represent complementary information on tissue’s structural integrity during thermal ablations. This work has received multiple awards from the International Society for Magnetic Resonance in Medicine (ISMRM). Following these initial contributions, RDH researchers have further developed their research activities in the field of MR Thermometry through 2 PhD theses, particularly with the objective of measuring temperature in both water and fat-containing tissues, while maintaining investigation on real-time elastography methods.
Elodie Breton, ebreton(at)unistra.fr Jonathan Vappou, jvappou(at)unistra.fr
Therapeutic Ultrasound
High Intensity Focused Ultrasound (HIFU) therapies are extremely promising non-invasive, non-ionizing methods capable of treating a wide spectrum of diseases. They rely on the physical interaction between the ultrasonic energy and the tissue to be treated. By adjusting the parameters of the ultrasonic beam, several mechanisms of action are possible, such as thermal ablations or localized tissue permeation for drug delivery for example. In collaboration with the Department of Interventional Imaging of Strasbourg University Hospital, Image Guided Therapy and Axilum Robotics, the RDH team has developed a new MR-guided HIFU device for treating musculoskeletal tumors. The UFOGUIDE device was successfully approved for clinical trials in 2020 and is now used in a clinical trial at Strasbourg University Hospital (clinicaltrials# NCT04803773). This device, and first clinical results have been published in Scientific Reports in 2022 [REF]. The UFOGUIDE device is a low-cost, fully functional MR-guided HIFU device whose ambition is to render these therapies more accessible and widespread. In parallel, the RDH team develops a robotized device for localized Blood-brain-barrier opening for treating neurological diseases, in collaboration with CEA/Neurospin (ANR 3BOPUS, 2017-2021). The main originality of the 3BOPUS device is that it allows targeting specific zones in the brain with great accuracy, without any need for real-time imaging guidance, thanks to the use of neuronavigation and collaborative robotics. These developments in the field of Therapeutic Ultrasound have led to the creation of a joint Laboratory between ICube and the company Image Guided Therapy in 2022. The aim of the TechnoFUS joint Laboratory is to make the best use of new technologies in MR Imaging, Robotics and Instrumentation to develop novel ultrasonic therapies. Website of the TechnoFUS lab

Jonathan Vappou, jvappou(at)unistra.fr Paolo Cabras, cabras(at)unistra.fr