Difference between revisions of "Interships"
| Line 1: | Line 1: | ||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
'''5/6 months M2 internship: Registration of biomechanical models with ultrasound images (RADIUS project)'''<br> | '''5/6 months M2 internship: Registration of biomechanical models with ultrasound images (RADIUS project)'''<br> | ||
Latest revision as of 13:43, 24 May 2023
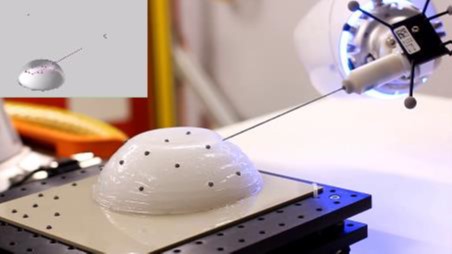
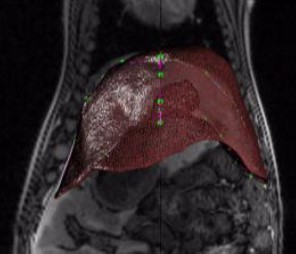
5/6 months M2 internship: Registration of biomechanical models with ultrasound images (RADIUS project)
Image-guided percutaneous methods have been progressively recognized as an efficient alternative for treating Hepatocellular Carcinoma (HCC). Non-invasive imaging techniques are required to control the needle's placement efficiently. The most spread imaging modality is Ultrasounds (US). This project aims at developing a novel solution for needle steering using intra-operative US images and non-rigid registration of a biomechanical model. We are looking for a trainee for a period of 5 to 6 months (between February and August 2023), level Master 2 or engineering school around the medical and surgical simulation for the insertion of needles guided by the image. This internship will concern the registration of the FE model. The biomechanical models will be used to extrapolate the 3D displacement of the volume, even where no imaging data are available. Such an approach can then be used to display with Augmented Reality (AR) 3D information of the organ on top of medical images and automatic needle steering. For this purpose, we will develop solutions to localize the probe and the US image's plane with an external infrared camera system (Optitrack).

Profile required: Very good level of programming in C++ / Good knowledge of image registration and biomechanical simulation / Experience in SOFA is a plus. Supervision: Dr. Hadrien Courtecuisse (CR CNRS) / Dr. Simon Chatelin (CR CNRS), Location: ICube (RDH and MLMS teams), civil hospital site (IHU and Clovis Vincent). Contact Click Here for More details
CAMMA group: Computational Analysis and Modeling of Medical Activities
We are looking for motivated and talented students with knowledge in computer vision and/or machine learning who can contribute to the development of our computer vision system for the operating room. Please feel free to contact Nicolas Padoy if you are interested to do your master's thesis or an internship with us (funding of ~500Euros/month will be provided during 4 to 6 months). The successful candidates will be part of a dynamic and international research group hosted within IHU Strasbourg , at the University Hospital of Strasbourg. They will thereby have direct contact with clinicians, industrial partners and also have access to an exceptional research environment. The CAMMA project is supported by the laboratory of excellence CAMI, the IdEx Unistra and IHU Strasbourg.